Simulador de brazo robótico industrial (Vídeo)
Construido con: Matlab, Teoría de control, Robótica, Álgebra Lineal, Interfaz de usuario, Robótica Industrial.
Proyecto desarrollado como proyecto secundario para el curso de Robótica Industrial en la Universidad de Castilla-La Mancha.
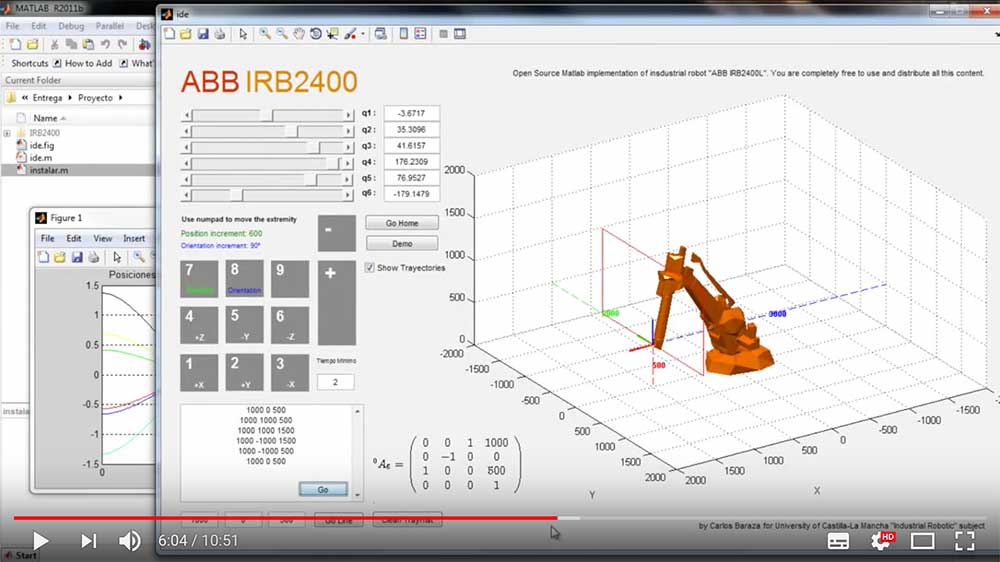
Todo el framework y el simulador de robot fue escrito por mí en el lenguaje de scripting de Matlab. Las ecuaciones de transformación cinemática inversa fueron resueltas manualmente usando técnicas de álgebra lineal para el robot ABB IRB2400.
Captura de pantalla