- Published on
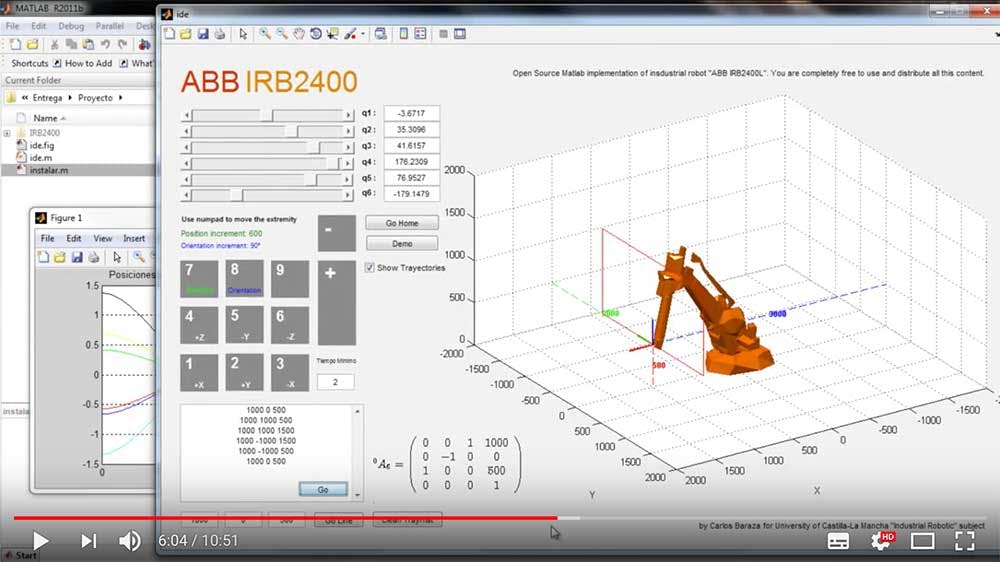
Industrial Robot Arm Simulator (Video)
- Authors
- Name
- Carlos Baraza
- @carlosbaraza
- Bio
- I write software and other philosophical stuff.


Built with: Matlab, Control theory, Robotics, Linear Algebra, UI, Industrial Robotics.
Project developed as side-project for the course on Industrial Robotics at the University of Castilla-La Mancha.
The entire framework and robot simulator was written by me in Matlab scripting language. The inverse kinetic transform equations were solved manually using linear algebra techniques for the ABB IRB2400 robot.